How to Perform Curvature Analysis¶
Tutorials
FlowMap embedding · Velocity embedding consistency · Trajectory and gene gradients · Curvature analysis
This page shows the core FlowMap call for curvature analysis. The runnable
notebook is available at tutorial/larry_curvature_tutorial.ipynb.
Load Data¶
The Larry data object is not included in the GitHub repository; download it
from Figshare and place it at tutorial/larry_flowmap_data.joblib before
running the notebook.
Data link: Larry Data Processed with FlowMap
from flowmap.utils import load_dataset
data = load_dataset("tutorial/larry_flowmap_data.joblib")
emb = data.embedder
Compute Curvature¶
compute_flow_curvature evaluates the fitted manifold spline and velocity
spline, then returns velocity, acceleration components, and curvature estimates.
from flowmap.geometry import compute_flow_curvature
curv = compute_flow_curvature(emb)
k_total = curv["curvature"]["total"]
k_steer = curv["curvature"]["steer"]
k_surface = curv["curvature"]["surface"]
Total Curvature¶
The total curvature combines intrinsic steering curvature and surface curvature:
fig, ax = plt.subplots(figsize=(6, 6))
plot_velocity_stream(
emb.X_emb,
spline=emb.spline_vf,
scatter_color=np.clip(k_total, None, np.percentile(k_total, 99)),
cmap="coolwarm",
scatter_size=10,
scatter_alpha=0.6,
show_colorbar=True,
ax=ax,
)
plt.show()
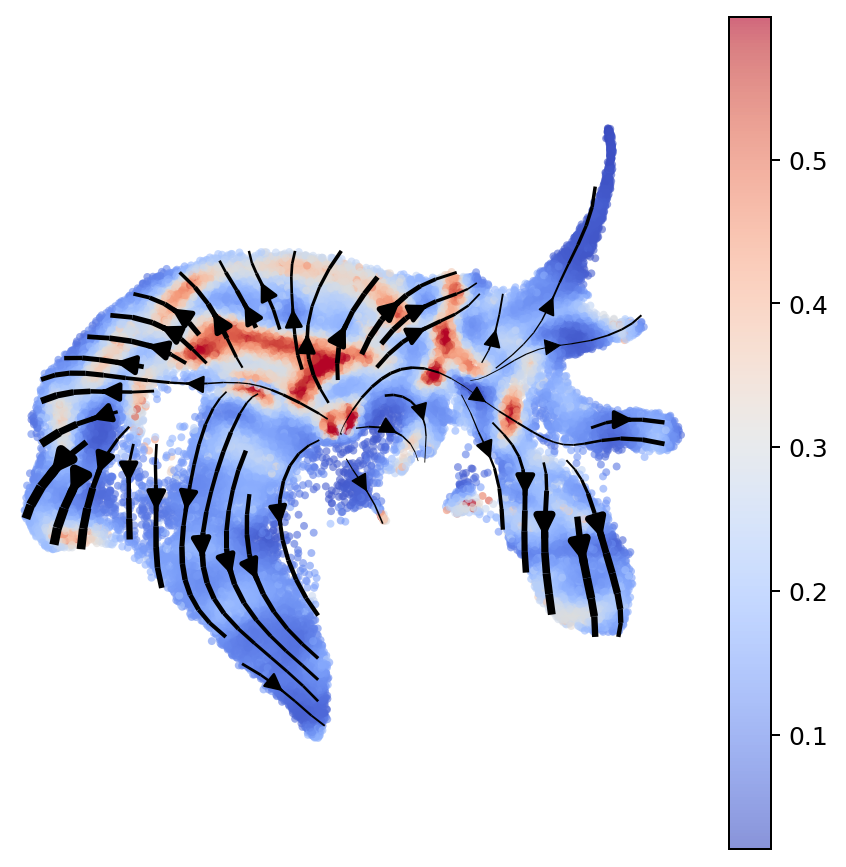
Total curvature shown on the Larry FlowMap embedding.¶
Decomposed Curvature¶
FlowMap separates acceleration into flow, steering, and surface components. The curvature terms are acceleration magnitudes normalized by squared speed:
fig, axes = plt.subplots(1, 3, figsize=(12, 4))
for ax, values, title in zip(
axes,
[k_total, k_steer, k_surface],
["total", "steer", "surface"],
):
plot_velocity_stream(
emb.X_emb,
spline=emb.spline_vf,
scatter_color=np.clip(values, None, np.percentile(values, 99)),
cmap="coolwarm",
scatter_size=8,
scatter_alpha=0.6,
ax=ax,
title=title,
)
plt.tight_layout()
plt.show()
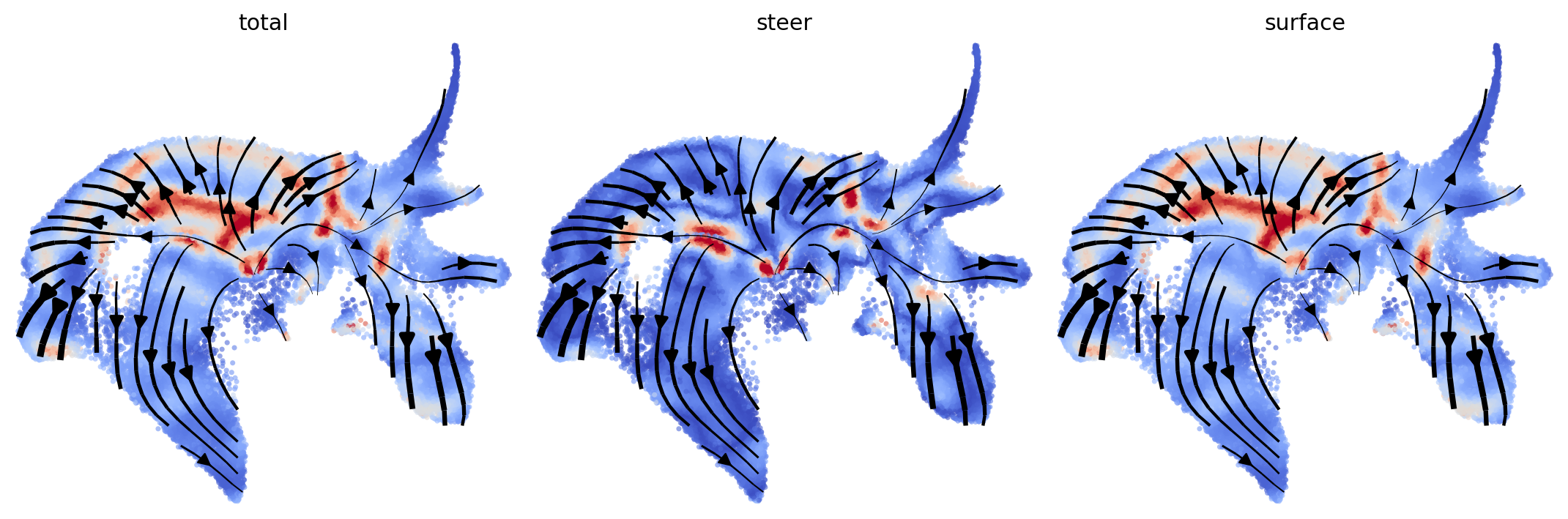
Total, steering, and surface curvature estimates.¶
Ternary Decomposition¶
The acceleration dictionary contains flow, steer, and surface
components. A ternary plot summarizes their relative contributions.
A_flow = np.linalg.norm(curv["acceleration"]["flow"], axis=1)
A_steer = np.linalg.norm(curv["acceleration"]["steer"], axis=1)
A_surface = np.linalg.norm(curv["acceleration"]["surface"], axis=1)
total = A_flow + A_steer + A_surface + 1e-12
flow_frac = A_flow / total
steer_frac = A_steer / total
surface_frac = A_surface / total
x = steer_frac + 0.5 * surface_frac
y = (np.sqrt(3) / 2) * surface_frac
fig, ax = plt.subplots(figsize=(5.8, 5.2))
ax.scatter(
x,
y,
s=6,
c=np.clip(k_total, None, np.percentile(k_total, 99)),
cmap="coolwarm",
alpha=0.35,
)
tri_x = [0, 1, 0.5, 0]
tri_y = [0, 0, np.sqrt(3) / 2, 0]
ax.plot(tri_x, tri_y, color="black", lw=1)
ax.text(-0.03, -0.04, "flow", ha="right", va="top")
ax.text(1.03, -0.04, "steer", ha="left", va="top")
ax.text(0.5, np.sqrt(3) / 2 + 0.04, "surface", ha="center", va="bottom")
ax.set_aspect("equal")
ax.set_axis_off()
plt.show()
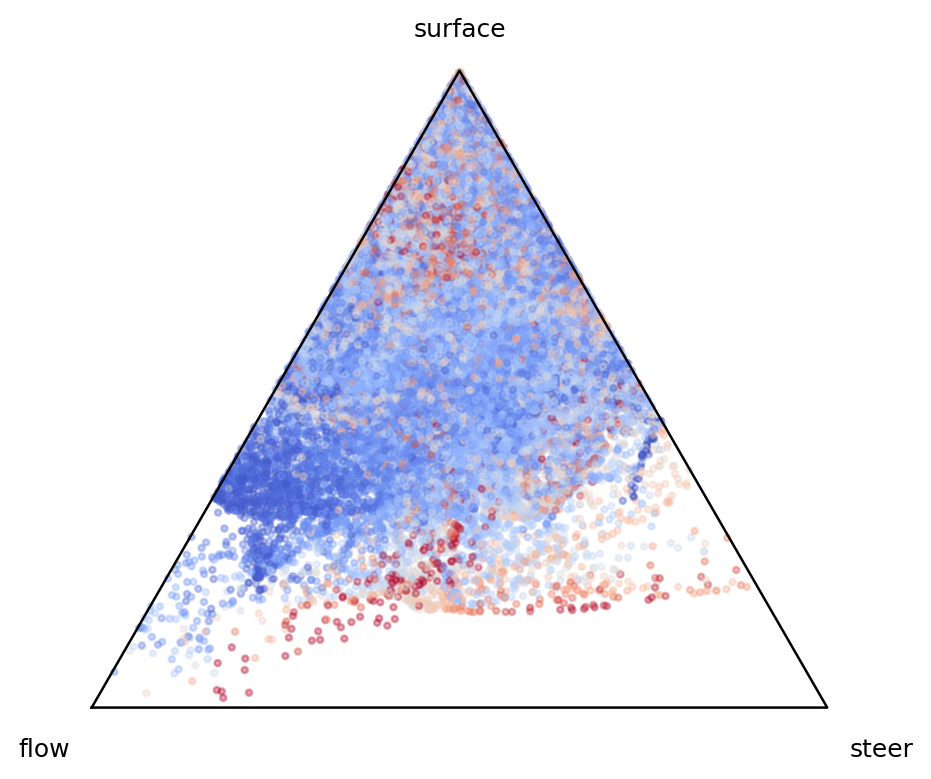
Relative flow, steering, and surface acceleration contributions.¶